Research
Multi-Modal Approach to Post-Stroke Hand Rehabilitation

Alexander Sprague, Mylah Williams
Hand impairment is one of the most common post-stroke disabilities. This can significantly impact fine motor skills that are important for everyday life, such as the ability to use fingers individually. This study examined a novel, multi-modal approach to post-stroke hand rehabilitation. Stroke survivors were recruited into a 15-session training protocol in which they played songs on a virtual keyboard to train finger individuation, while wearing a soft, pneumatic hand exoskeleton, which provided extension assistance, and receiving peripheral nerve stimulation of the median and ulnar nerves to encourage Hebbian learning. (Clinical trial information: link)
Human-Machine Interface in Virtual Piano Game for Home-Based Therapy
Alexander Sprague, Mylah Williams
Independent finger movement is a key feature of hand function, which is often impaired in individuals with subacute stroke and cerebral palsy, among other clinical populations. The goal of this project is to integrate a virtual piano game with a markerless optical motion capture system, the Leap Motion Controller 2. This can allow for increased accessibility and adoption of rehabilitative technologies to train finger individuation, whether it be in a clinical setting or the home.
Targeted Brain and Muscle Feedback for Hand Recovery
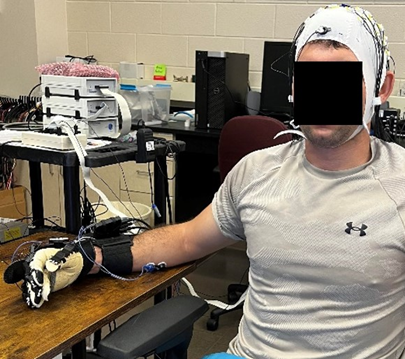
Rinku Roy, Joseph Stark, Huy Tran
Individuals post-stroke often experience hand movement difficulties because stroke disrupts the brain regions that normally control voluntary movement. This research focuses on retraining the brain to control these movements through motor imagery, which involves mentally practicing a movement without actually performing it. To make recovery more effective, we combine this mental practice with physical practice. When participants successfully activate the correct brain signals (captured using electroencephalography – EEG), a wearable robotic device driven by their muscle activity (captured using electromyography – EMG) helps them move their hand. By combining brain training with assisted hand movement, our goal is to improve hand function to help people become more independent in daily life.
Hand Exoskeleton Development and Testing

Christopher Vogel, Alexander Sprague, Noah Liberacki, Kira Martin, Shubhi Mathur
Many stroke survivors struggle to use their hands for daily tasks, especially ones that require independent finger movements. The Bidirectionally Actuated Cable Glove (BAC-Glove) is a hand exoskeleton designed to drive independent flexion and extension movements of each finger. Linear actuators affixed to a splint on the dorsal forearm are attached to rigid cables running through guides on the fingers. These allow the fingers to be individually pushed into flexion or pulled into extension. Current areas of focus include evaluating the BAC-Glove’s range of motion and force production capabilities, redesigning PCBs to optimize signal quality, and designing a novel finger attachment mechanism to eliminate the need to put on a glove and improve adjustability.
Assessment of Stroke Impact on Common- and Dual-Goal Bimanual Tasks
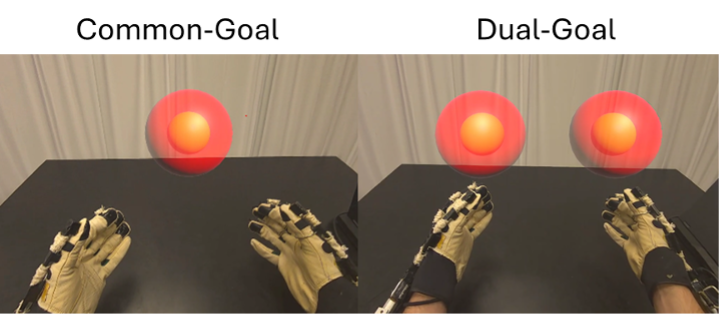
Christopher Vogel
Even if chronic impairment of the upper extremity is unilateral, impairment of just one hand has been shown to negatively affect the performance of tasks associated with activities of daily living, as many of these tasks require bimanual coordination of both sensory and motor information. The objective of this proposal is to characterize how stroke may impact the performance of bimanual tasks involving common goal or dual goals across the hands. This project explores responses to imposed perturbations during task performance to elicit compensation by the contralateral hand in neurotypical individuals and individuals post-stroke, and also explores asymmetric sensory cues to evaluate for bias towards the sensory feedback applied to a particular hand. To simulate perturbations of motion and asymmetry in sensation, a custom hand exoskeleton will be used for haptic feedback in augmented reality. Collectively, information from both aims will allow for analysis of how alterations to sensory information and kinematic movements are managed between neurotypical and post-stroke individuals for bimanual task performance. This work has implications for upper extremity rehabilitation post-stroke by revealing potential deficits in bimanual coordination following stroke, which in turn may help to guide the development of new therapies emphasizing bimanual performance with customization based on hand dominance and the brain hemisphere affected by the stroke.
HD-sEMG for Precise Neural Interface Development
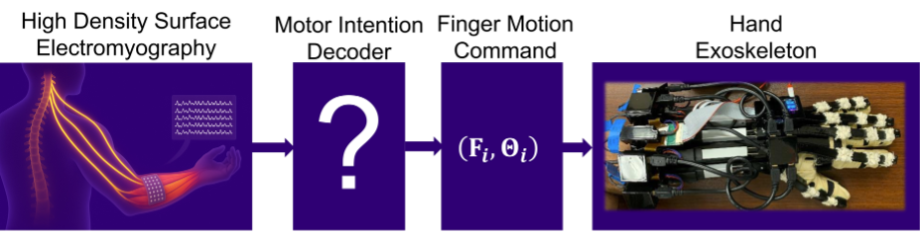
Rinku Roy, Alexander Sprague, Abolfazl Shahrooei, Luke Arthur, Om Patel
We develop reliable neural interfaces to support recovery of, and compensate for, impaired hand function in people who have lost motor control, especially after stroke. Using high-density surface electromyography (HD-sEMG) as a non-invasive window into spinal motor neuron output, we decompose surface recordings into individual motor unit activity patterns. We then build models that map these neural features to continuous outputs such as fingertip force or joint angles, using both classical function estimators and specialized machine learning architectures to decode motor intent with high accuracy. Finally, we embed these decoders in custom software and hand exoskeleton hardware to test intuitive, real-time control in both individuals post-stroke and neurotypical participants, aiming to create HD-sEMG-based interfaces that deliver robust, usable improvements in fine hand motor function.
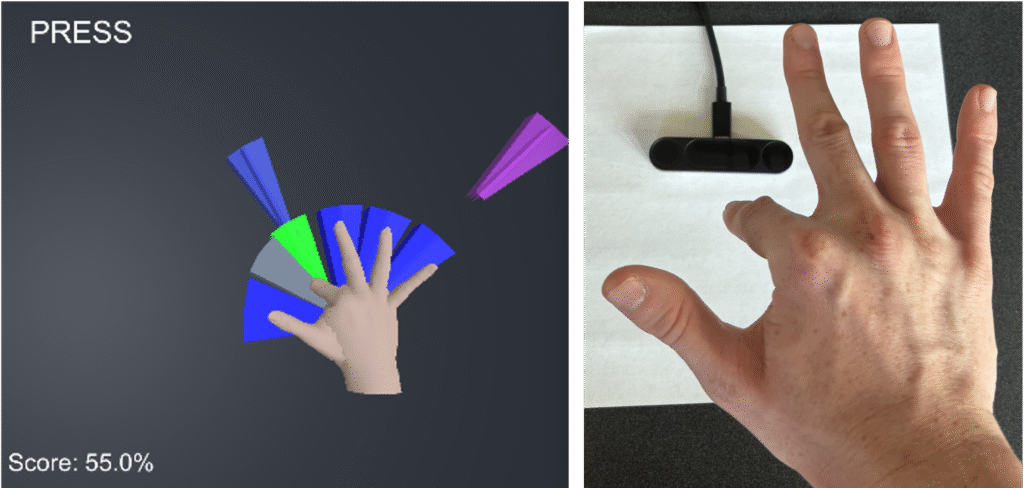
Training activation patterns in acute stroke with electromyography Serious Games
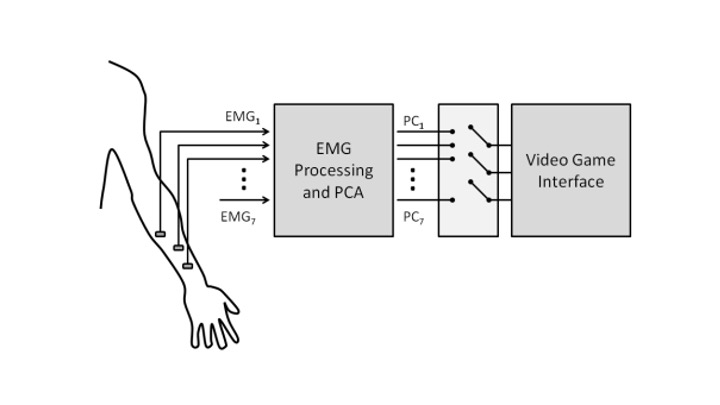
Alexander Sprague, Abolfazl Shahrooei
Roughly two-thirds of the 7 million stroke survivors in the US suffer from sensorimotor impairment. Traditional rehabilitation programs address this problem by trying to encourage limb movement; however, they are unable to address the underlying electrical activation patterns that coordinate limb movement. This research tests the feasibility of monitoring the electrical activity of muscles (EMG) in the arms as an indicator of a patient’s progression in therapy. In addition, the research uses a Serious Games interface that will allow patients to play games using EMG sensors in hopes that by learning how to control their activation patterns, patients will be able to relearn the nerve connections that are responsible for limb movement. Currently testing in partnership with occupational therapists at UNC Hillsborough Inpatient Rehabilitation Center